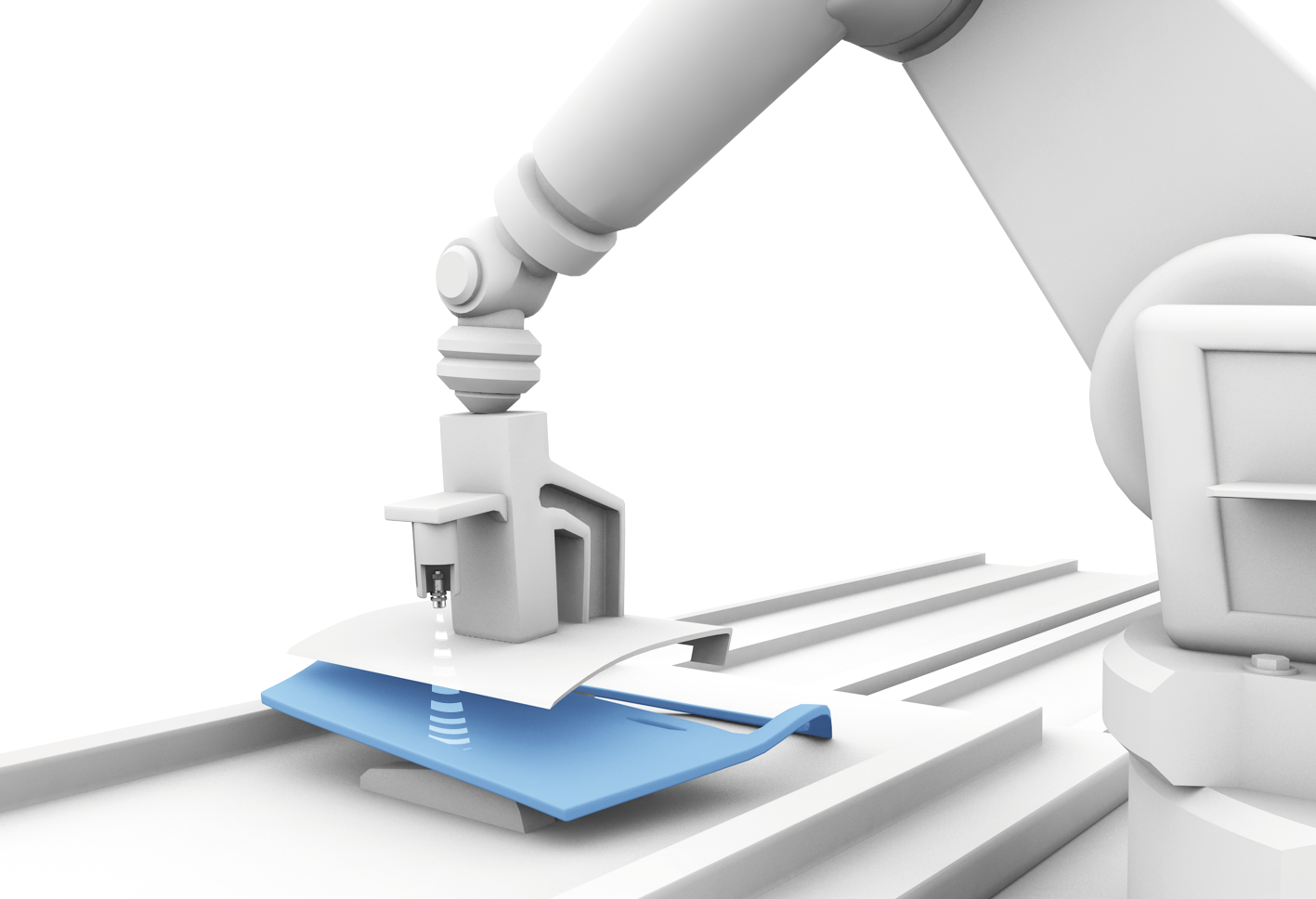
Positionierung Roboterkopf am Metallteil
Herausforderung:
Metallteile sind glänzend, matt oder verkratzt und mit optischen Lösungen kaum zuverlässig zu detektieren.
Lösung:
Der Radarsensor ist am Kopf des Roboters montiert und misst den Abstand zum Metallteil. Wird ein bestimmter Abstand erreicht, kann die Roboter-Handhabungseinheit das Teil greifen.
Vorteile:
Robuste Erkennung verschiedener Materialien mit hoher und wiederholbarer Genauigkeit von +/- 1 mm.