EtherCAT-Integration
Bei der EtherCAT-Integration besteht das System aus folgenden Komponenten:
Busmaster
Busmodules/Slaves (hier das Busmodul BNI)
Gerätedaten
Um den Busmaster typgerecht zu parametrieren, liegen dem Busmodul BNI Gerätedaten in Form von drei ESI-Dateien bei.
Ein-/Ausgangspuffer
Im Eingangs- und Ausgangspuffer findet der Datenaustausch mit dem steuernden System statt. Die Größe dieser Puffer muss vom Master konfiguriert werden.
Projektierung
Hinweis
Vor der Verwendung dieser Funktion prüfen, ob das Modul IO‑Link unterstützt. Weitere Informationen zu IO‑Link‑fähigen Produktvarianten siehe: Unterstützte Produktvarianten
Bei der Projektierung wird das BNI-Busmodul als modulares Gerät abgebildet. Die zur Projektierung benötigten Gerätedaten sind in den ESI-Dateien hinterlegt. Die Datenmodule der Ein-/Ausgänge, der IO-Link Ports und eventueller Zusatzmodule werden in der Projektierungssoftware steckplatzbezogen dargestellt.
Die ESI-Dateien stellen die möglichen Datenmodule (Ein-/Ausgänge, IO-Link Ports unterschiedlicher Datenbreite und sonstige Zusatzmodule) zur Verfügung.
Zur Konfiguration des BNI werden die passenden Datenmodule einem bestimmten Steckplatz zugeordnet. Nicht benutzte Steckplätze können freigelassen werden.
Integration in Projektierungssoftware
Beispielhaft wird die Anbindung des BNI an eine Beckhoff TwinCAT Steuerung mit dem TwinCAT System Manager gezeigt. Die genaue Vorgehensweise hängt von der verwendeten Projektierungssoftware ab.
ESI-Dateien installieren
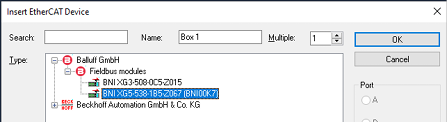
Die Gerätebeschreibung hat den folgenden Namen: Balluff BNI XG5-538-1B5-Z067 ECS V.x.x.x.xml
Die Datei in das entsprechende TwinCAT-Verzeichnis (im Standard: „C:\TwinCAT\3.1\Config\Io\EtherCAT“) kopieren.
⇒ Installierte Geräte sind ab dem nächsten Start des TwinCAT System Managers verfügbar.
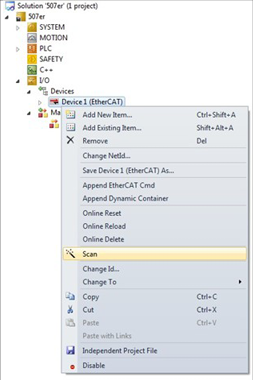
Automatisch scannen
Voraussetzung
Vor dem Anschließen von Geräten an das EtherCAT-Netz muss sich das EtherCAT-System in einem sicheren, stromlosen Zustand befinden.
Betriebsspannung einschalten und den TwinCAT System Manager im Config-Modus starten.
BNI als Box scannen.
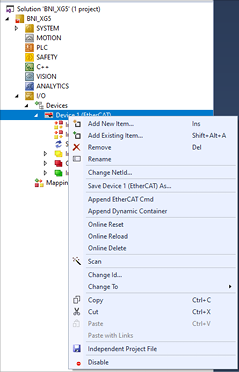
Gerät manuell anfügen
Voraussetzung
Vor dem Anschließen von Geräten an das EtherCAT-Netz muss sich das EtherCAT-System in einem sicheren, stromlosen Zustand befinden.
Betriebsspannung einschalten und den TwinCAT System Manager im Config-Modus starten.
Box anhängen.
Box wählen.
Notwendige Konfiguration am Gerät
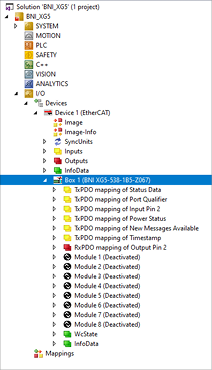
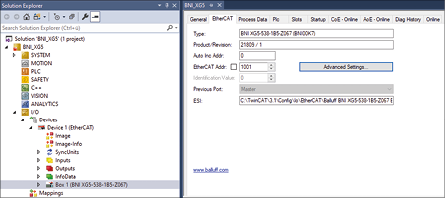
Nach dem automatischen Scannen oder manuellen Hinzufügen erscheint das Gerät in der Baumstruktur von TwinCAT.
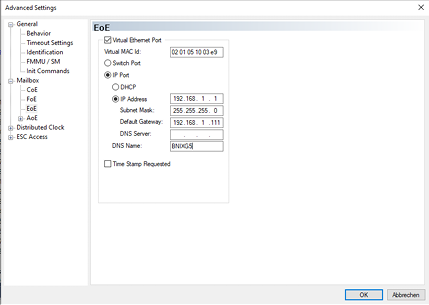
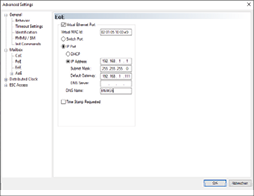
Das BNI unterstützt EoE (Ethernet over EtherCAT). Um TwinCAT zu konfigurieren, im Reiter EtherCAT Erweiterte Einstellungen wählen.
Es muss zuerst ein gültiger DNS-Name und danach eine gültige IP-Adresse eingetragen werden.
Station Alias konfigurieren
Der Stations Alias kann unter dem Reiter EtherCAT Erweiterte Einstellungen ausgewählt werden.

Hinweis
Der neue Wert ist erst nach einem Reset gültig.
Netzwerkmodul konfigurieren
Hinweis
Vor der Verwendung dieser Funktion prüfen, ob das Modul IO‑Link unterstützt. Weitere Informationen zu IO‑Link‑fähigen Produktvarianten siehe: Unterstützte Produktvarianten
Das BNI ist ein modulares EtherCAT-Gerät. Das Gerät hat folgende Slot-Struktur:
Slot number |
Meaning |
|---|---|
1-8 |
IO-Link Ports |
Hinweis
Die Summe der Ausgangsdaten darf 256 Byte nicht überschreiten.
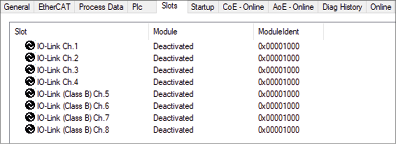
Um die IO-Link Ports zu konfigurieren, muss den EtherCAT-Slots eine definierte Anzahl von Prozessdaten (Puffergröße) zugeordnet werden. Im TwinCAT System Manager funktioniert das wie folgt:
Belegung eines IO-Link-Channels (oder Ports) mit x löschen.
Der auf der linken Seite gewählte Channel mit
<mit der auf der rechten Seite gewählten Modulkonfiguration bestücken.Konfiguration mit rNeustart von TwinCAT im Konfig-Modus an den EtherCAT-Slave übertragen.
Bitmapping und Funktion
Signale von konfigurierten Eingängen oder Ausgängen werden in den Modulen STD_IN_1bit (Eingänge Pin 4), Input Pin 2 (Eingänge Pin 2) sowie STD_OUT_1bit (Ausgänge Pin 4) und Output Pin 2 (Ausgänge Pin 2) abgebildet.
Hinweis
XG1-Geräte haben keine Ausgänge auf Pin 2.
Netzwerkmodule
Die IO-Link Module sind stets nach demselben Schema aufgebaut:
IOLI/Ox/xBytes
Anzahl der verwendeten Prozessdaten (sollte gleich oder größer als die Prozessdatenlänge des IO-Link-Devices sein)
E = Eingangsdaten
A = Ausgangsdaten
I/O = Eingangs- und Ausgangsdaten
Kurzschlüsse und Neustart-Bits
Das BNI startet automatisch neu, wenn ein Kurzschluss an einem der IO-Link-Ports auftritt. Es sind keine Neustart-Bits erforderlich.
IO-Link State
Hinweis
Vor der Verwendung dieser Funktion prüfen, ob das Modul IO‑Link unterstützt. Weitere Informationen zu IO‑Link‑fähigen Produktvarianten siehe: Unterstützte Produktvarianten
Im IO-Link State wird der momentane Status jedes Ports angezeigt.
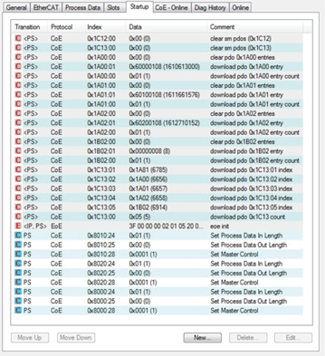
Startup
Im Startup können die IO-Link-Ports und Ausgänge vorkonfiguriert werden. Weitere Informationen siehe Konfiguration ohne ESI.
Die Einträge werden beim Überspielen der Konfiguration übertragen.
Konfiguration der Module
Validierung
Keine Validierung: Validierung deaktiviert, jedes Device wird akzeptiert.
Kompatibilität: Hersteller-ID und Device-ID werden mit den Daten des Moduls verglichen. Nur bei Übereinstimmung, wird die IO-Link-Kommunikation gestartet.
Folgende Werte sind für die Einstellung der Validierung möglich:
Value |
Validation |
|---|---|
0 |
No validation |
1 |
Compatible (VID + DID) |
Die Validierung kann über das CoE-Objekt _zusätzliche IO-Link-Konfigurationsdaten _ für jeden Port mit Subindex 1 (Validierung und Backup) aktiviert werden. Die verwendeten Werte für die Validierung müssen im CoE-Objekt IO-Link-Konfigurationsdaten für jeden Port konfiguriert werden.
Parameterserver
Eingeschaltet : Datenhaltungsfunktionen aktiv, Parameterdaten und Identifikationsdaten des IO-Link-Devices werden remanent gespeichert.
Deaktiviert : Datenhaltungsfunktion deaktiviert, gespeicherte Daten bleiben gespeichert.
Gelöscht : Datenhaltungsfunktion deaktiviert, gespeicherte Daten werden gelöscht.
Upload freigegeben : Wählbar, ob ein Upload der Parameterdaten in die Datenhaltung des Netzwerkmodulports durchgeführt werden soll oder nicht. Wird der Upload freigegeben, startet der Master einen Upload der Parameterdaten, sobald ein Device einen Upload anfordert (Uploadflag gesetzt) oder wenn im Masterport keine Daten hinterlegt sind (z. B. nach Löschung der Daten oder vor dem ersten Daten-Upload).
Upload sperren : Wird der Upload gesperrt, wird kein Upload der Daten gestartet. Bei einer Upload-Anforderung vom IO-Link-Device wird im Falle unterschiedlicher Parametersätzen ein Download (sofern aktiviert) gestartet, da kein Upload durchgeführt werden darf.
Download freigeben : Wählbar, ob ein Download der Parameterdaten auf das IO-Link-Device durchgeführt werden soll oder nicht. Sobald sich die gespeicherten Parameterdaten im Parameterserver des Ports vom angeschlossenen IO-Link-Device unterscheiden und keine Upload-Anforderung vom IO-Link-Device vorhanden ist, wird ein Download durchgeführt.
Download sperren : Wird der Download gesperrt, findet ein Upload (sofern aktiviert) der Parameterdaten statt, unabhängig vom Uploadflag des IO-Link-Devices.
Upload und Download sperren : Werden Upload und Download gesperrt, findet kein Parameterdaten-Austausch statt. Das IO-Link-Device kommuniziert dann trotzdem mit dem IO-Link-Port.
Folgende Werte für die Einstellungen sind möglich:
Wert |
Funktion |
|---|---|
|
einschalten |
|
ausschalten |
|
löschen |
|
Upload einschalten |
0xX2 |
Download einschalten |
Der Datenspeicher kann über das CoE-Objekt zusätzliche IO-Link-Konfigurationsdaten für jeden Port mit Subindex 1 aktiviert werden (Validierung und Backup). Der Inhalt der Datenspeicherung über EtherCAT kann nicht gelesen oder geschrieben werden.
Hinweis
Nach dem Upload der Parameterdaten bleiben die Vendor-ID und Device-ID des angeschlossenen IO-Link-Device bis zum Löschen der Datensätze gespeichert.
Es findet beim Anlauf des angeschlossenen IO-Link-Devices eine Validierung statt. Nur ein IO-Link-Device vom gleichen Typ kann für die Datenhaltung eingesetzt werden.
Um ein IO-Link-Device eines anderen Typs zu verwenden, muss der Inhalt des Parameterservers gelöscht werden.
Uploadflag am IO-Link-Device
Hinweis
Vor der Verwendung dieser Funktion prüfen, ob das Modul IO‑Link unterstützt. Weitere Informationen zu IO‑Link‑fähigen Produktvarianten siehe: Unterstützte Produktvarianten
Das Uploadflag wird benötigt, um bereits gespeicherte Daten im Parameterserver mit neuen Parameterdaten desselben IO-Link-Devices zu überschreiben.
Um das Uploadflag eines IO-Link-Devices zu aktivieren, muss im Parameter-Index 0x02, Subindex 0 der Wert 0x05 eingegeben werden.
Failsafe-Werte
Fällt die EtherCAT-Verbindung aus oder ist der EtherCAT-Status nicht Operate, verwenden die IO-Link-Ports diese Werte:
Wenn sich ein Port im IO-Link-Zustand Operate befindet, werden die ausgegebenen Prozessdaten auf ungültig geschaltet.
Wenn sich Pin 2 oder Pin 4 im digitalen Ausgangsmodus befinden, wird Null (low level) ausgegeben.
IO-Link-Parametrierung
Hinweis
Vor der Verwendung dieser Funktion prüfen, ob das Modul IO‑Link unterstützt. Weitere Informationen zu IO‑Link‑fähigen Produktvarianten siehe: Unterstützte Produktvarianten
Über das Objekt 0x4000 (IO-Link Service Data Ch. X) können IO-Link-ISDU-Parameter aus dem IO-Link-Device gelesen oder geschrieben werden. Dazu müssen der entsprechende Index und Subindex eingetragen und beim Schreiben die entsprechende Länge und die Daten eingetragen werden. Über das Control Objekt wird dann der Lese- oder Schreibauftrag gestartet. Im Status Objekt wird das Ergebnis angezeigt.
Werte für den Control
Value |
Function |
|---|---|
|
No function |
|
Write |
|
Read |
Werte für den Status
Value |
Status |
|---|---|
|
No status |
|
Active/Busy |
|
Access |
|
Error |
|
Fail |
Beispiel einer CoE-Einstellung
Dieses Beispiel zeigt, wie der Index 0x40 einer Smartlight (Modus) durch Lesen und Schreiben geändert wird.
Modul wählen.
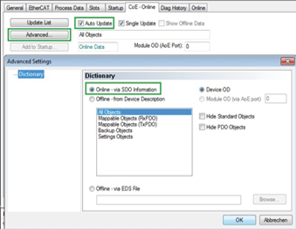
CoE - Online öffnen.
Einstellung Auto Update aktivieren.
Unter _Advanced _ die Einstellung Online - via SDO Information wählen.
In Port 4030:0 wählen (hier Kanal 4).
Index lesen, indem 4030:0 doppelt angeklickt und der jeweilige Index angegeben wird (hier 0x0040 64).
In Control den Befehl 0x03 schreiben.
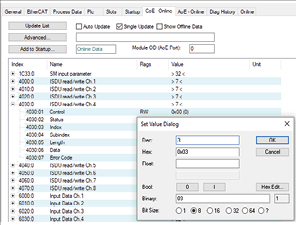
⇒ Inhalt des Index wird ausgelesen und in Data angezeigt.
Daten ändern, Länge angeben und den Befehl
0x02verwenden.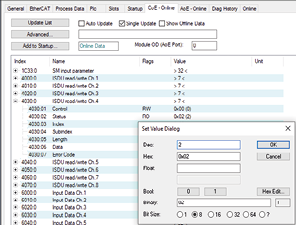
⇒ Die Daten werden geschrieben und der Parameter wird im Device geändert.
Azyklischer Zugang über AoE
Das ETG5001.6220 beschreibt AoE anstelle von CoE für den ISDU-Lese-/Schreibzugriff auf IO-Link-Geräteparameter. Details zu ADS können in der Beckhoff TwinCAT Dokumentation und in ETG.1020 gefunden werden. Im Gegensatz zu CoE erlaubt AoE eine nicht-blockierende Verarbeitung.
AoE-ISDU-Zugriffe verwenden diese Definitionen (alle sind 32 Bit):
AoE IndexGroup =
0x0000F302AoE PortNumber =
0x00001000+ IO-Link-Portnummer, beginnend mit 0.AoE IndexOffset
16 Bit IO-Link-Index
8 Bit immer null
8 Bit IO-Link-Subindex
Rückgabe Fehlercode
16 Bit zusätzliche Informationen über den Fehlercode, der 0x0700 (ADS-Gerätefehler) lautet.
16 Bit-Fehlercode via IO-Link
Funktionsblöcke ADSREAD und ADSWRITE
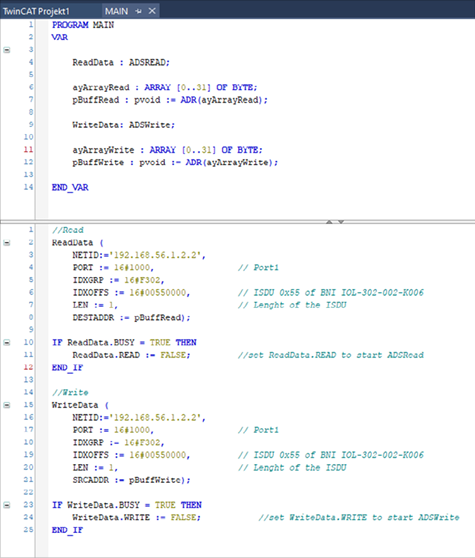
Funktionsblock ADSREAD in TwinCat
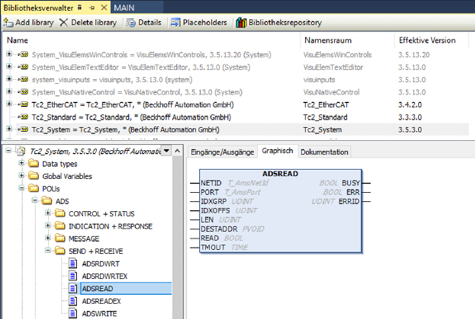
ADSREAD-Befehle
Name |
Type |
Geerbt von |
Adresse |
Initial |
Kommentar |
|---|---|---|---|---|---|
NETID |
T_AmsNetId |
– |
– |
– |
Ams net id |
PORT |
T_AmsPort |
– |
– |
– |
ADS-Kommunikationsport |
IDXGRP |
UDINT |
– |
– |
– |
Indexgruppe |
IDXOFFS |
UDINT |
– |
– |
– |
Indexoffset |
LEN |
UDINT |
– |
– |
– |
Maximale Anzahl der zu lesenden Datenbytes (LEN ≤ maximale Größe des Zielpuffers) |
DESTADDR |
PVOID |
– |
– |
– |
Zeiger des Zielpuffers |
Lesen |
BOOL |
– |
– |
– |
Steigende Flanke startet Befehlsausführung. |
TMOUT |
TIME |
– |
– |
DEFAULT_ADS_TIMEOUT |
Maximal zulässige Zeit für die Ausführung dieses ADS-Befehls |
BUSY |
BOOL |
– |
– |
– |
Busy-Flag |
ERR |
BOOL |
– |
– |
– |
Error-Flag |
ERRID |
UDINT |
– |
– |
– |
ADS-Fehlercode |
Funktionsblock ADSWRITE in TwinCat
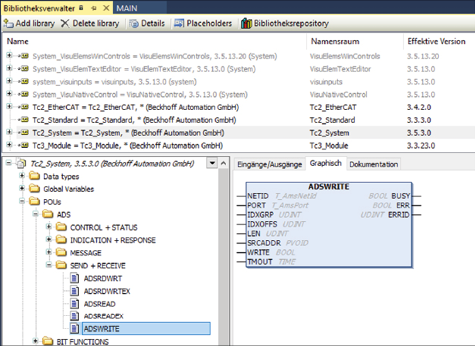
ADSWRITE-Befehle
Name |
Type |
Geerbt von |
Adresse |
Initial |
Kommentar |
|---|---|---|---|---|---|
NETID |
T_AmsNetId |
– |
– |
– |
Ams net id |
PORT |
T_AmsPort |
– |
– |
– |
ADS-Kommunikationsport |
IDXGRP |
UDINT |
– |
– |
– |
Indexgruppe |
IDXOFFS |
UDINT |
– |
– |
– |
Indexoffset |
LEN |
UDINT |
– |
– |
– |
Maximale Anzahl der zu schreibenden Datenbytes (LEN ≤ maximale Größe des Quellpuffers) |
SRCADDR |
PVOID |
– |
– |
– |
Zeiger des Quellpuffers |
SCHREIBEN |
BOOL |
– |
– |
– |
Steigende Flanke startet Befehlsausführung. |
TMOUT |
TIME |
– |
– |
DEFAULT_ADS_TIMEOUT |
Maximal zulässige Zeit für die Ausführung dieses ADS-Befehls |
BUSY |
BOOL |
– |
– |
– |
Busy-Flag |
ERR |
BOOL |
– |
– |
– |
Error-Flag |
ERRID |
UDINT |
– |
– |
– |
ADS-Fehlercode |
Vorbereitung für den Webserver
EoE-Setup
Um auf den Webserver des BNI-Moduls zugreifen zu können, muss zuerst der Zugriff über EoE (Ethernet over EtherCAT) konfiguriert werden.
Schaltfläche Advanced Settings… wählen.
Gültigen DNS-Name sowie eine gültige IP-Adresse eintragen.
Netzwerk vorbereiten
Bevor der Webserver über EoE erreicht werden kann, muss das Netzwerk der Beckhoff-Steuerung konfiguriert werden.
Beckhoff-Steuerung konfigurieren
Beiden Netzwerkkarten muss eine feste IP-Adresse vergeben werden.
Auf der Beckhoff-Steuerung Start > Control Panel Netwok and Dial-up Connections > PCI…Settings wählen.
IP-Adresse vergeben.

Unter Start > Control panel > Beckhoff CX Configuration Tool > Miscellaenous die Einstellung IP-Routing aktivieren.
EoE und PC-Netzwerke
Bei den EoE-Einstellungen im Twincat muss als Default Gateway die IP-Adresse der zweiten Netzwerkkarte der Beckhoff-Steuerung eingetragen werden.
Als Default-Gateway für die Netzwerkkonfiguration des PCs muss die IP-Adresse der ersten Netzwerkkarte der Beckhoff-Steuerung eingegeben werden.
Objektverzeichnis
-
TxPDO Input Pin 2 mappen (
0x1A90) - Input Pin 2, one bit for each port.
-
TxPDO Pin 4 mappen (
0x1A0n) -
The following index range applies in a modular EtherCAT device:
0x6xxx ist ein modulspezifischer Eingangsbereich für TxPDO-Daten.
0x7xxx ist ein modulspezifischer Ausgangsbereich für RxPDO-Daten.
IO-Link-Daten sind bis zu 32 Byte für Eingang und Ausgang.
Wenn ein Anschluss als Digital Input oder Digital Output konfiguriert ist, wird der Wert von Pin 4 auf Datenbyte 0, Bit 0 gemappt.
-
TxPDO PowerStatus mappen (0x1A91)
-
Index
Subindex
Name
DataType
0xF601
0x01
Globaler Status, siehe Globale Statuswerte (Subindex 0x01)
UINT8
0x02
Kurzschluss in der Sensorversorgung; ein Bit für jeden Port
UINT8
0x03
Kurzschluss an Pin 4 der Aktorversorgung, ein Bit für jeden Port
UINT8
0x04
Kurzschluss an Pin 2 der Aktorversorgung, ein Bit für jeden Port
UINT8
Globale Statuswerte (Subindex 0x01)
Bit
Beschreibung
0
Bit 0: Sensorversorgung niedrig (1 = niedrig, 0 = OK)
1
Bit 1: Aktorversorgung niedrig (1 = niedrig, 0 = OK)
-
IO-Link Service Data Ch. x (0x4000 - 0x4FFF)
-
Hinweis
Vor der Verwendung dieser Funktion prüfen, ob das Modul IO‑Link unterstützt. Weitere Informationen zu IO‑Link‑fähigen Produktvarianten siehe: Unterstützte Produktvarianten
Index
Subindex
Name
DataType
Zugriff
0x40n0
0x01
Control
UINT8
RW
0x02
Status
UINT8
RO
0x03
Index
UINT16
RW
0x04
Subindex
UINT8
RW
0x05
Length
UINT8
RW
0x06
Data
UINT32
RW
n = 0…7
0x07
Fehlecode
UINT16
RO
Werte der Steuerung (Subindex 0x01)
Wert (UINT8)
Funktion
0
no control action
2
schreiben
3
lesen
Werte für den Status (Subindex 0x02)
Wert (UINT8)
Status
0
no activity
1
busy
2
success
4
error
0xFF
failure
-
IO-Link Configuration Data Ch. x (0x8000 - 0x8FFF)
-
Hinweis
Vor der Verwendung dieser Funktion prüfen, ob das Modul IO‑Link unterstützt. Weitere Informationen zu IO‑Link‑fähigen Produktvarianten siehe: Unterstützte Produktvarianten
Index
Subindex
Name
Wert
DataType
0x8nn0
n = 0…70x04
Device-ID
24-Bit-ID
UINT32
0x05
Vendor-ID
16-Bit-ID
UINT32
0x32
IO-Link Revision
0x10 oder 0x11
UINT8
0x33
Frame Capability
unbenutzt
UINT8
0x34
Desired Cycle Time
Cycle Time
UINT8
0x35
Offset Time
unbenutzt
UINT8
0x36
Max. PD In Length
Max. Länge
UINT8
0x37
Max. PD Out Length
Max. Länge
UINT8
0x38
Compatible ID
unbenutzt
UINT16
0x40
Master Control
siehe Konfiguration ohne ESI.
UINT16
-
IO-Link Information Data Ch. x (0x9000 – 0x9FFF)
-
Hinweis
Vor der Verwendung dieser Funktion prüfen, ob das Modul IO‑Link unterstützt. Weitere Informationen zu IO‑Link‑fähigen Produktvarianten siehe: Unterstützte Produktvarianten
Index
Subindex
Name
DataType
Zugriff
0x90n0, n = 0…7
0x04
Device-ID
UINT32
RO
0x05
Vendor-ID
UINT32
RO
0x20
IO-Link Revision
UINT8
RO
0x22
Min Cycle Time
UINT8
RO
0x24
Process Data In Length
UINT8
RO
0x25
Process Data Out Length
UINT8
RO
-
IO-Link Diagnosis Data Ch. x (0xA000 – 0xAFFF)
-
Hinweis
Vor der Verwendung dieser Funktion prüfen, ob das Modul IO‑Link unterstützt. Weitere Informationen zu IO‑Link‑fähigen Produktvarianten siehe: Unterstützte Produktvarianten
Index
Subindex
Name
DataType
Zugriff
0xa0n0
n = 0…70x01
IO-Link State
UINT8
RO
0x02
Lost Frames
UINT8
RO
-
Werte für IO-Link State (Subindex 0x01)
-
Wert
Name
Status des IO-Link-Ports
0
INACTIVE
deaktiviert
1
DIGINPUT
Digital Input
2
DIGOUTPUT
Digital Output
3
ESTABLISHCOMM
unbenutzt
4
INITMASTER
unbenutzt
5
INITDEVICE
unbenutzt
6, 7
Unused
unbenutzt
8
OPERATE
IO-Link, im Status Operate
9
STOP
IO-Link, nicht im Status Operate State (Fehler oder kein Device)
-
Werte für Lost Frames (Subindex 0x02)
-
This parameter counts lost IO-Link Frames (M sequence repeats).
Beim Wechsel des Geräts werden in der Regel zwei Wiederholungsversuche hinzugefügt. Dieser Wert wird nur während des Starts auf Null zurückgesetzt. Der Wert wird in regelmäßigen Abständen aktualisiert, z. B. einmal pro Sekunde.
-
IO-Link Status Data Ch. x (0xF100)
-
Hinweis
Vor der Verwendung dieser Funktion prüfen, ob das Modul IO‑Link unterstützt. Weitere Informationen zu IO‑Link‑fähigen Produktvarianten siehe: Unterstützte Produktvarianten
Index
Subindex
Name
DataType
Zugriff
0xF100
0x01
Status of IO-Link Port 1
UINT8
RO
0x02
Status of IO-Link Port 2
UINT8
RO
0x03
Status of IO-Link Port 3
UINT8
RO
0x04
Status of IO-Link Port 4
UINT8
RO
0x05
Status of IO-Link Port 5
UINT8
RO
0x06
Status of IO-Link Port 6
UINT8
RO
0x07
Status of IO-Link Port 7
UINT8
RO
0x08
Status of IO-Link Port 8
UINT8
RO
Das CoE-Objekt Gerätestatus (0xF100) wird als TxPDO Mapping von Status Data in die Prozessdaten gemappt.
-
IO-Link Port Qualifier Ch. x (0xF101)
-
Hinweis
Vor der Verwendung dieser Funktion prüfen, ob das Modul IO‑Link unterstützt. Weitere Informationen zu IO‑Link‑fähigen Produktvarianten siehe: Unterstützte Produktvarianten
Index
Subindex
Name
DataType
Zugriff
0xF101
0x01
Port Qualifier Port 1
UINT8
RO
0x02
Port Qualifier Port 2
UINT8
RO
0x03
Port Qualifier Port 3
UINT8
RO
0x04
Port Qualifier Port 4
UINT8
RO
0x05
Port Qualifier Port 5
UINT8
RO
0x06
Port Qualifier Port 6
UINT8
RO
0x07
Port Qualifier Port 7
UINT8
RO
0x08
Port Qualifier Port 8
UINT8
RO
Das CoE-Objekt Port Qualifier (0xF101) wird als TxPDO-Mapping von Port Qualifier in die Prozessdaten gemappt.
-
Port Qualifier-Bits
-
Bit
Beschreibung
4
PortActive / Port aktiviert
1 = Port kann verwendet werden. 2 = Port deaktiviert.
5
DevCom / Gerät ist betriebsbereit
1 = Device detected und Status Operate 0 = anderer Status
6
DevErr / Gerätefehler
1 = Fehler aufgetreten (Validierungsfehler, Kurzschluss, etc.) 0 = OK
7
PQ / Gültigkeit der Eingangsdaten des IO-Link-Geräts
1 = gültig, 0 = ungültig
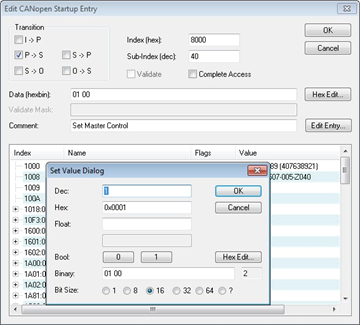
Konfiguration ohne ESI
Hinweis
Vor der Verwendung dieser Funktion prüfen, ob das Modul IO‑Link unterstützt. Weitere Informationen zu IO‑Link‑fähigen Produktvarianten siehe: Unterstützte Produktvarianten
Die Ports können auch ohne Einbinden einer ESI konfiguriert werden. Dazu muss in das Objekt 0x8000 der Master Control und die jeweilige Länge der Prozessdaten eingestellt werden.
Werte für den Master Control (80X0:28)
Wert |
Funktion |
|---|---|
0x0000 |
deaktiviert |
0x0001 |
Port im Standard-Input |
0x0002 |
Port im Standard-Output |
0x0003 |
Port im IO-Link-Mous |
0x0005 |
Power |
Prozessdatenlänge
IO-Link-Ports
Byte |
Datenlänge |
|---|---|
1 Byte |
0x08 |
2 Byte |
0x16 |
4 Byte |
0x83 |
6 Byte |
0x85 |
8 Byte |
0x87 |
10 Byte |
0x89 |
16 Byte |
0x8F |
24 Byte |
0x97 |
32 Byte |
0x9F |
Standard Eingangs-/Ausgangs-Ports
0x01
Beispiel
MasterControl = 3 –> IO-Link |
||||
|---|---|---|---|---|
IO-Link size |
Process Data In Length |
Process Data Out Length |
||
Hex |
Dec |
Hex |
Dec |
|
IOL_l_1byte |
0x08 |
8 |
0x00 |
0 |
IOL_l_2byte |
0x16 |
22 |
0x00 |
0 |
IOL_l_4byte |
0x83 |
131 |
0x00 |
0 |
IOL_l_6byte |
0x85 |
133 |
0x00 |
0 |
IOL_l_8byte |
0x87 |
135 |
0x00 |
0 |
IOL_l_10byte |
0x89 |
137 |
0x00 |
0 |
IOL_l_16byte |
0x8F |
143 |
0x00 |
0 |
IOL_l_24byte |
0x97 |
151 |
0x00 |
0 |
IOL_l_32byte |
0x9F |
159 |
0x00 |
0 |
IOL_l_1byte/0_1bytes |
0x08 |
8 |
0x08 |
8 |
IOL_l_2byte/0_2bytes |
0x16 |
22 |
0x16 |
22 |
IOL_l_2byte/0_4bytes |
0x16 |
22 |
0x83 |
131 |
IOL_l_4byte/0_4bytes |
0x83 |
131 |
0x83 |
131 |
IOL_l_4byte/0_2bytes |
0x83 |
131 |
0x16 |
22 |
IOL_l_2byte/0_8bytes |
0x16 |
22 |
0x87 |
135 |
Im Startup sieht die Konfiguration für Port 6 im IO-Link-Modus mit 32 Byte Prozessdatenlänge für Input und Output z. B. folgendermaßen aus:
